Geppetto: Enabling Semantic Design of Expressive Robot Behaviors
Abstract
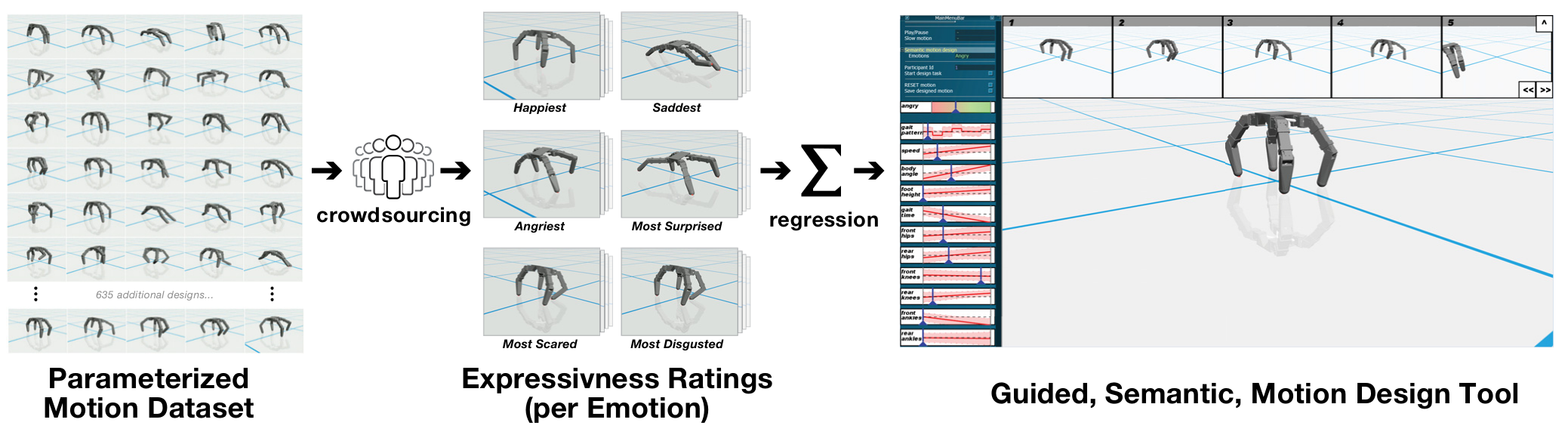
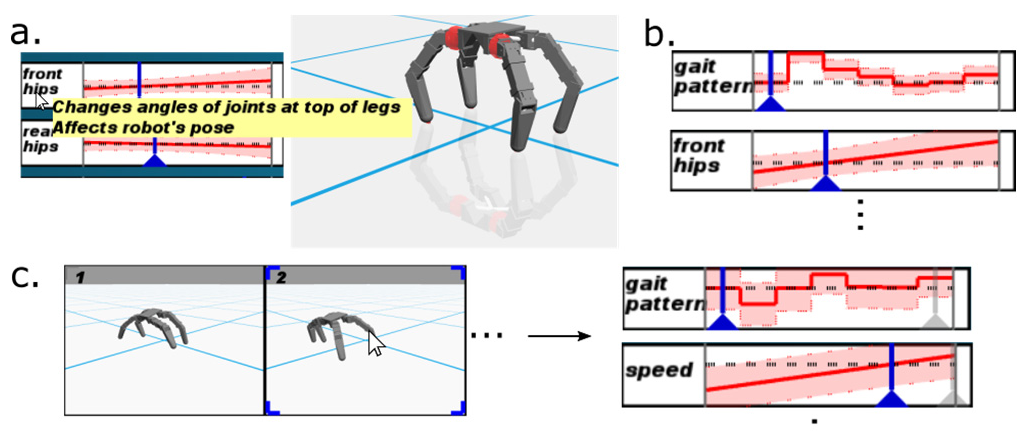
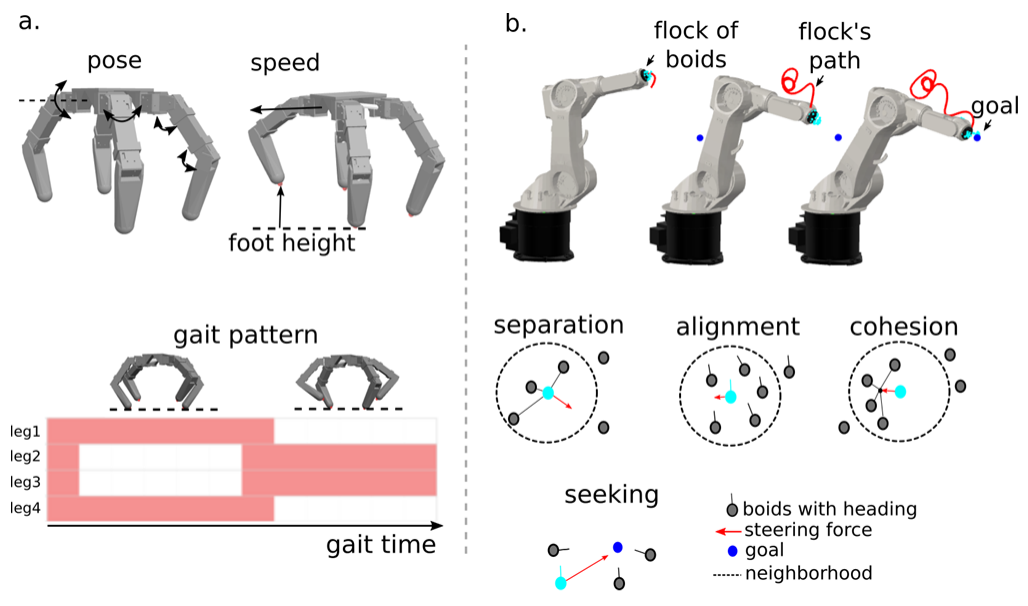
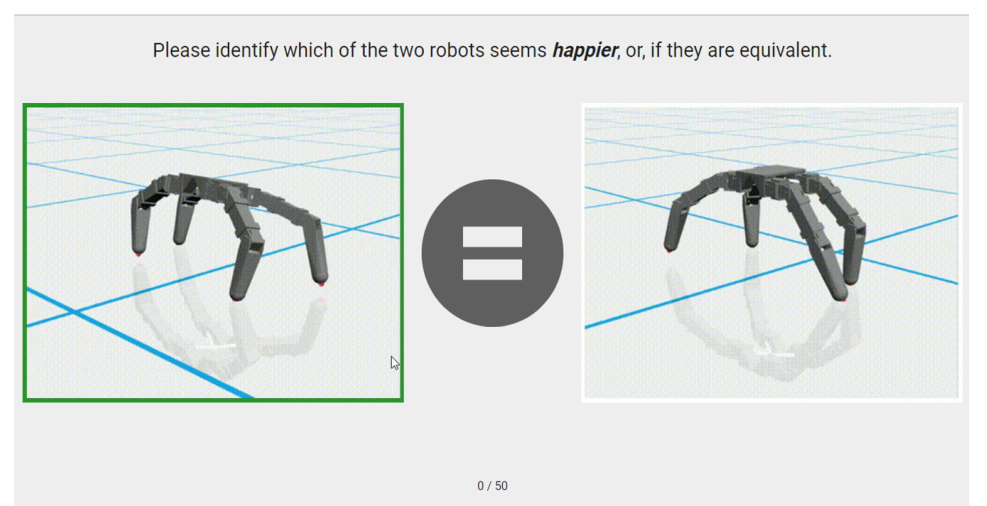
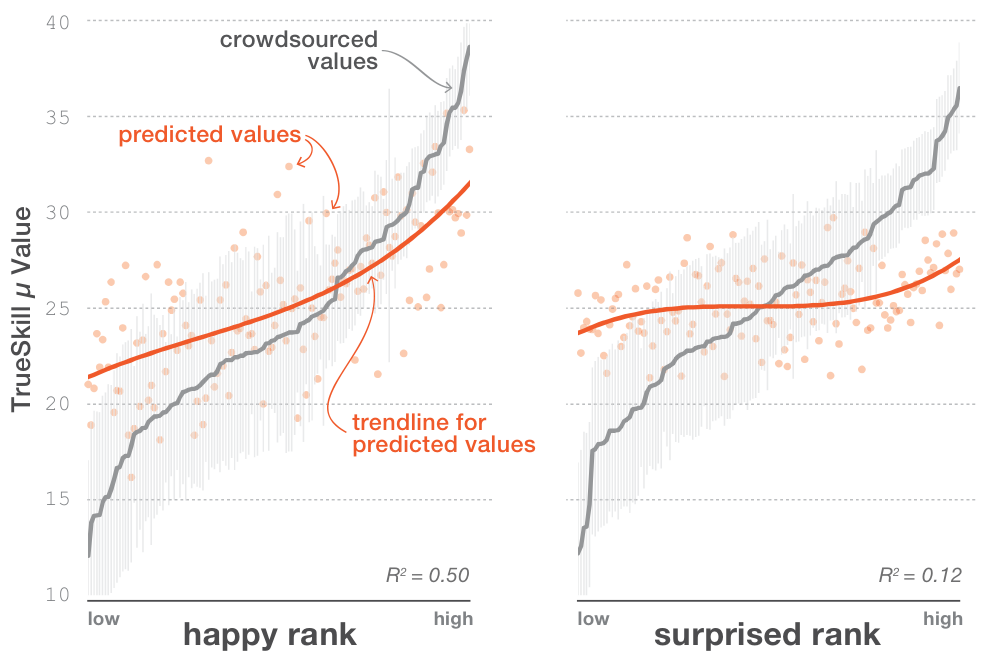
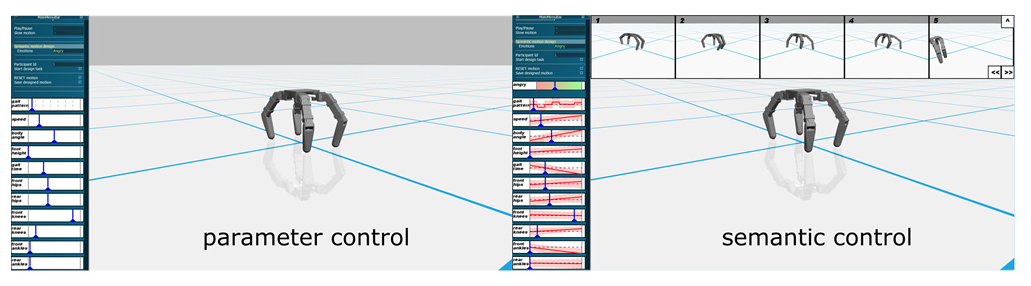
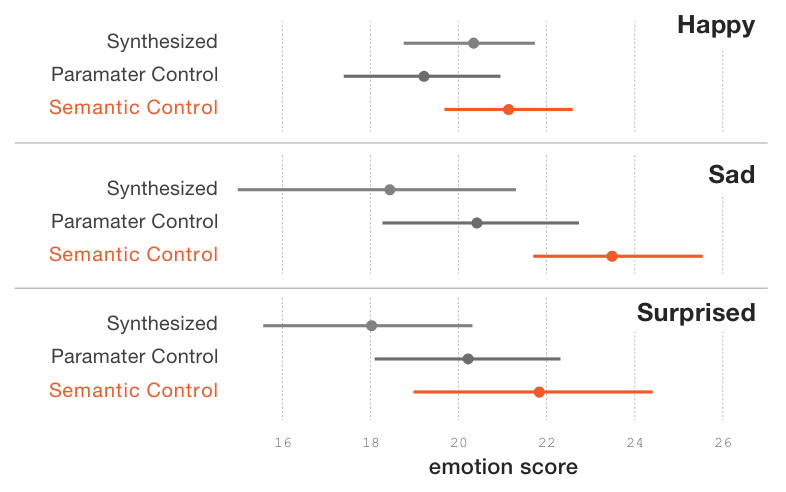
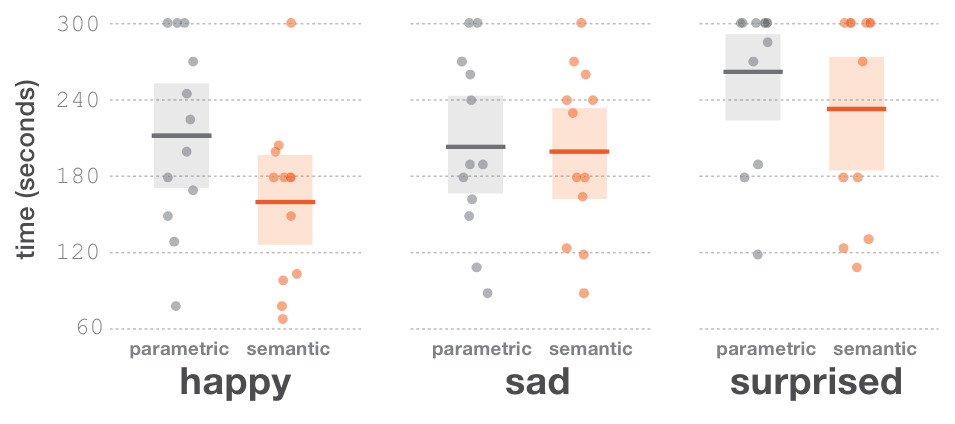
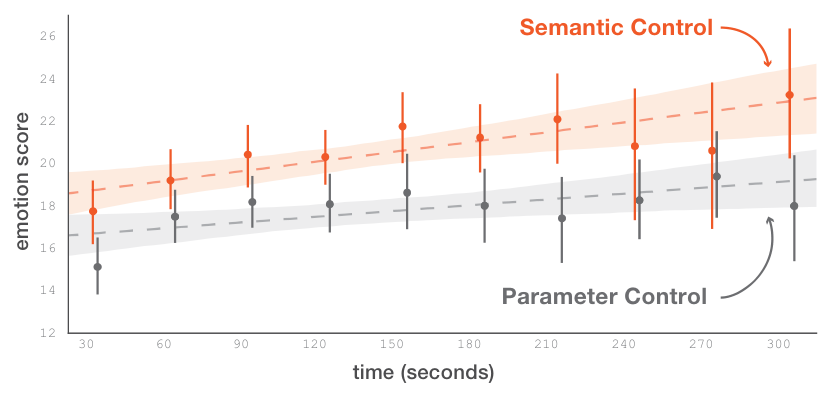
Expressive robots are useful in many contexts, from industrial to entertainment applications. However, designing expressive robot behaviors requires editing a large number of unintuitive control parameters. We present an interactive, data-driven system that allows editing of these complex parameters in a semantic space. Our system combines a physics-based simulation that captures the robot's motion capabilities, and a crowd-powered framework that extracts relationships between the robot's motion parameters and the desired semantic behavior. These relationships enable mixed-initiative exploration of possible robot motions. We specifically demonstrate our system in the context of designing emotionally expressive behaviors. A user-study finds the system to be useful for more quickly developing desirable robot behaviors, compared to manual parameter editing.
Figures
BibTeX
@inproceedings{10.1145/3290605.3300599,
abstract = {Expressive robots are useful in many contexts, from industrial to entertainment applications. However, designing expressive robot behaviors requires editing a large number of unintuitive control parameters. We present an interactive, data-driven system that allows editing of these complex parameters in a semantic space. Our system combines a physics-based simulation that captures the robot's motion capabilities, and a crowd-powered framework that extracts relationships between the robot's motion parameters and the desired semantic behavior. These relationships enable mixed-initiative exploration of possible robot motions. We specifically demonstrate our system in the context of designing emotionally expressive behaviors. A user-study finds the system to be useful for more quickly developing desirable robot behaviors, compared to manual parameter editing.},
address = {New York, NY, USA},
author = {Desai, Ruta and Anderson, Fraser and Matejka, Justin and Coros, Stelian and McCann, James and Fitzmaurice, George and Grossman, Tovi},
booktitle = {Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems},
doi = {10.1145/3290605.3300599},
isbn = {9781450359702},
keywords = {expressive robots, semantic editing, robots, semantic design},
location = {Glasgow, Scotland Uk},
numpages = {14},
pages = {1–14},
publisher = {Association for Computing Machinery},
series = {CHI '19},
title = {Geppetto: Enabling Semantic Design of Expressive Robot Behaviors},
url = {https://doi.org/10.1145/3290605.3300599},
year = {2019}
}