Transformer-Based Interfaces for Mechanical Assembly Design: A Gear Train Case Study

Abstract
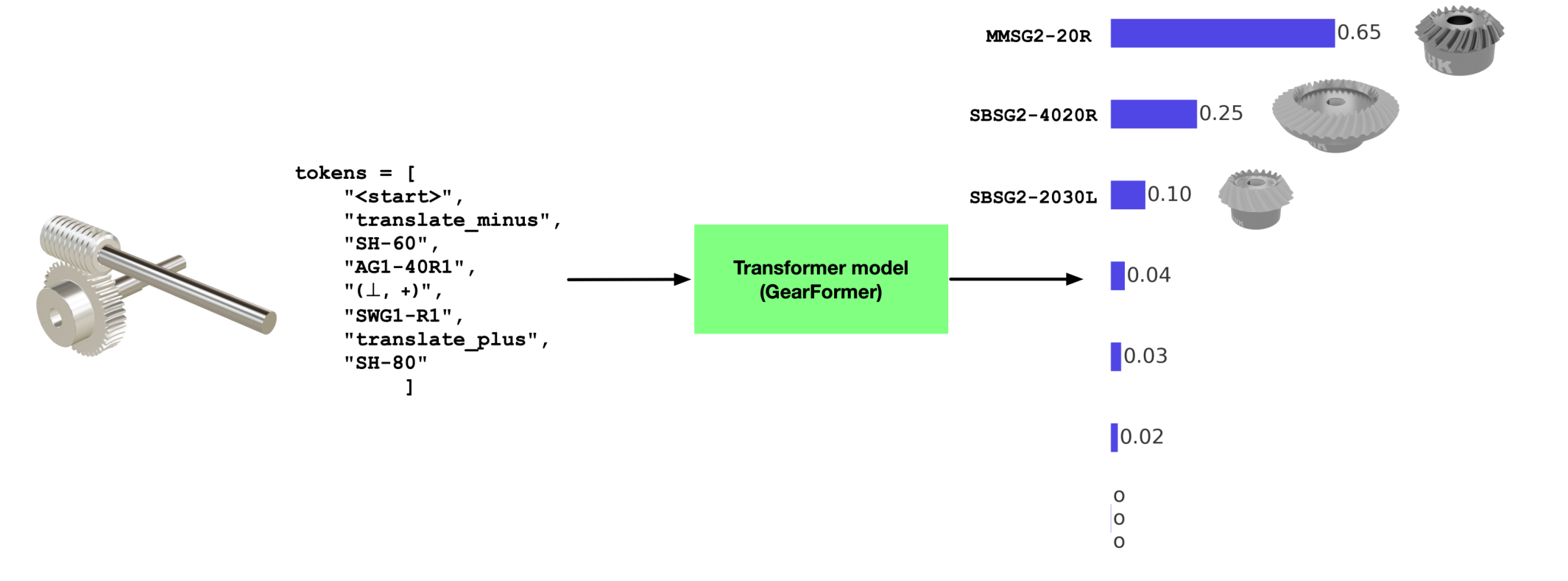
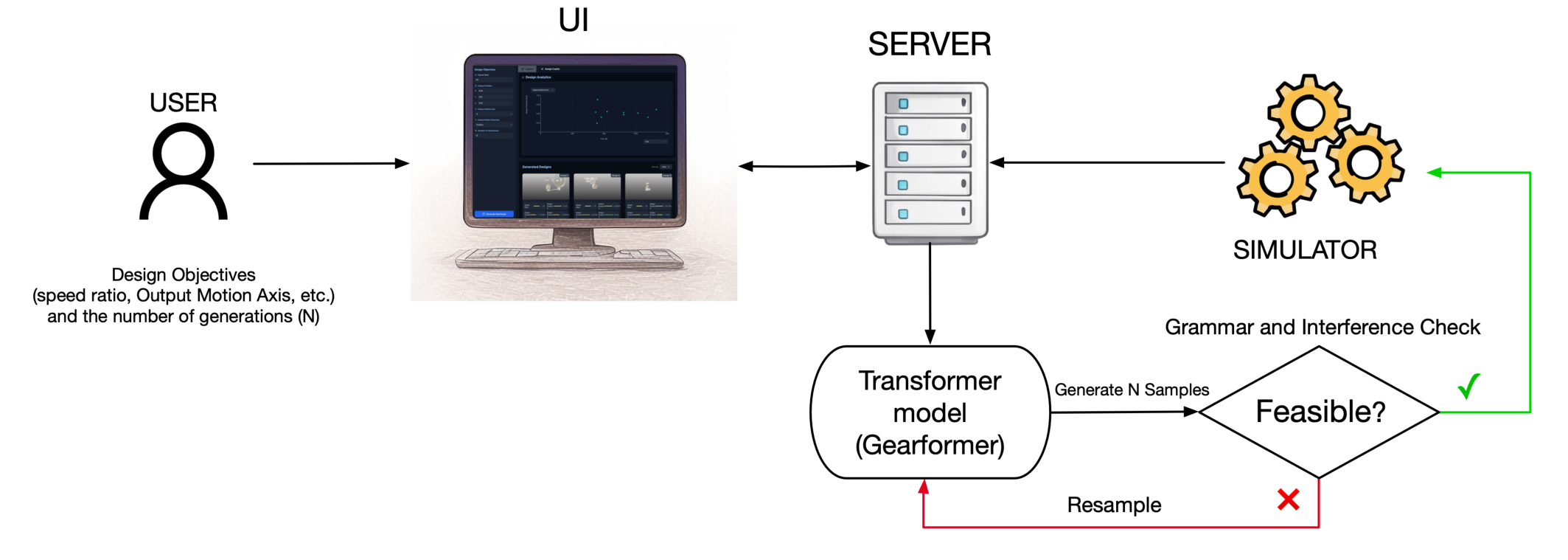
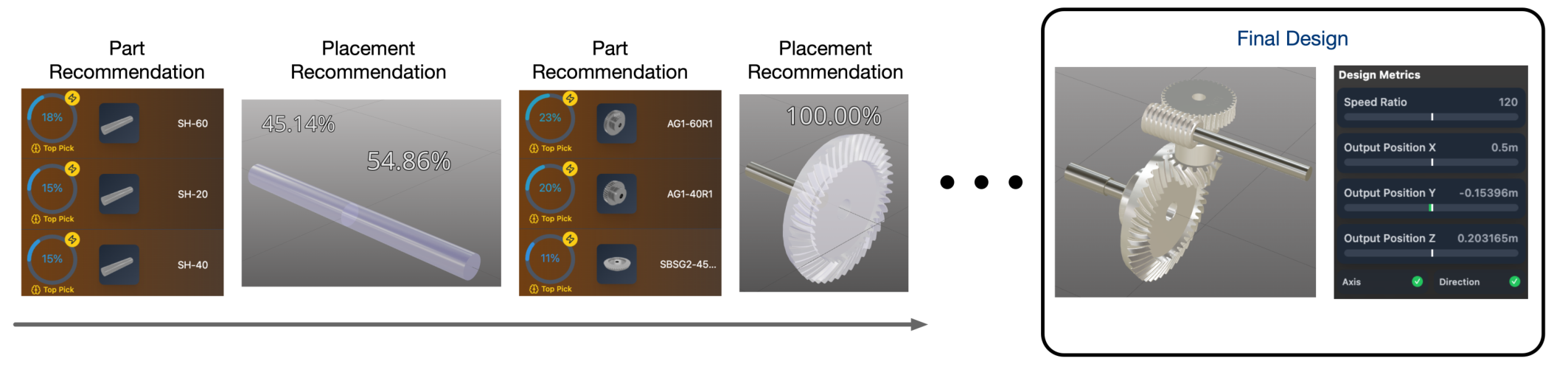
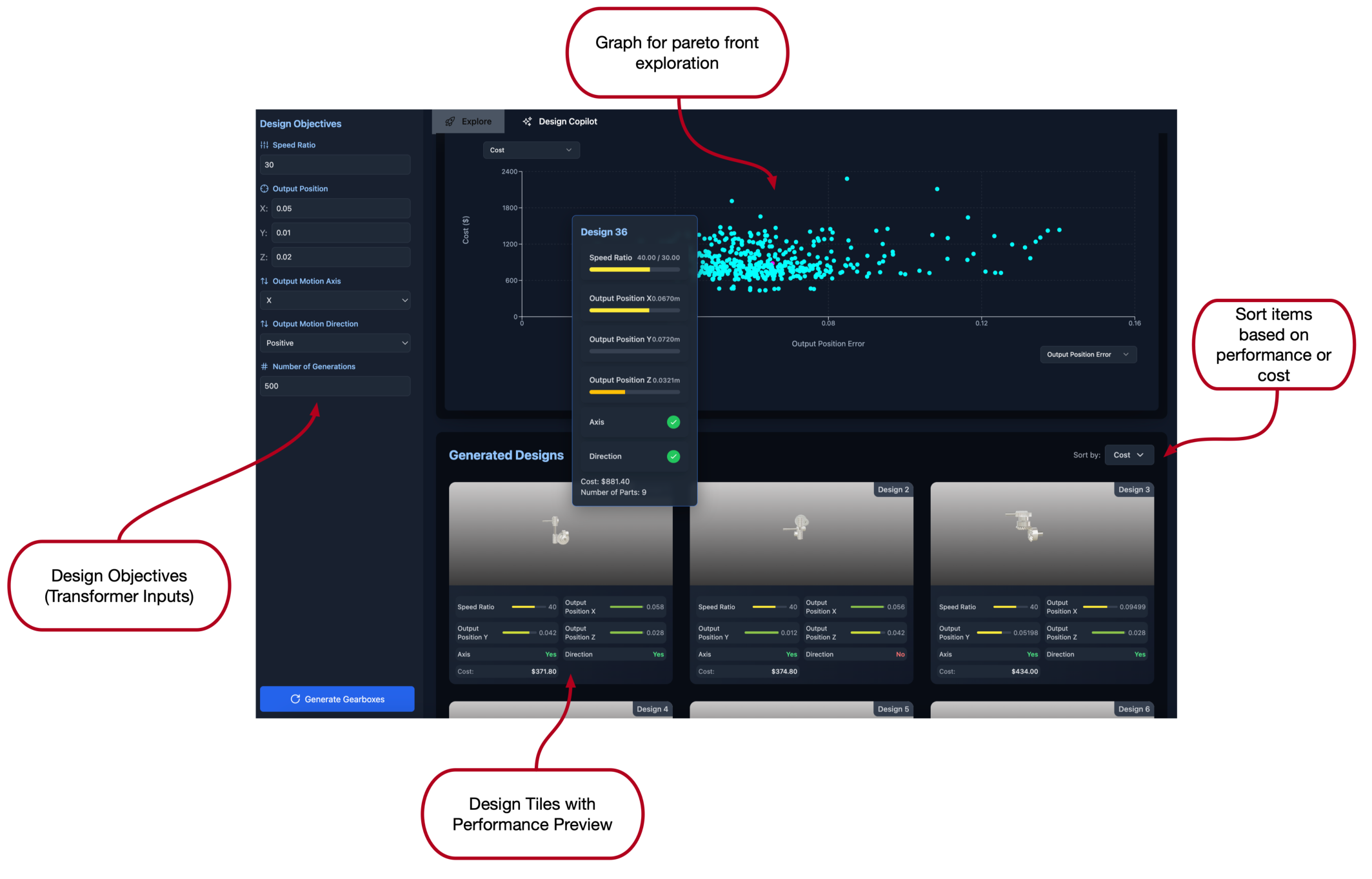
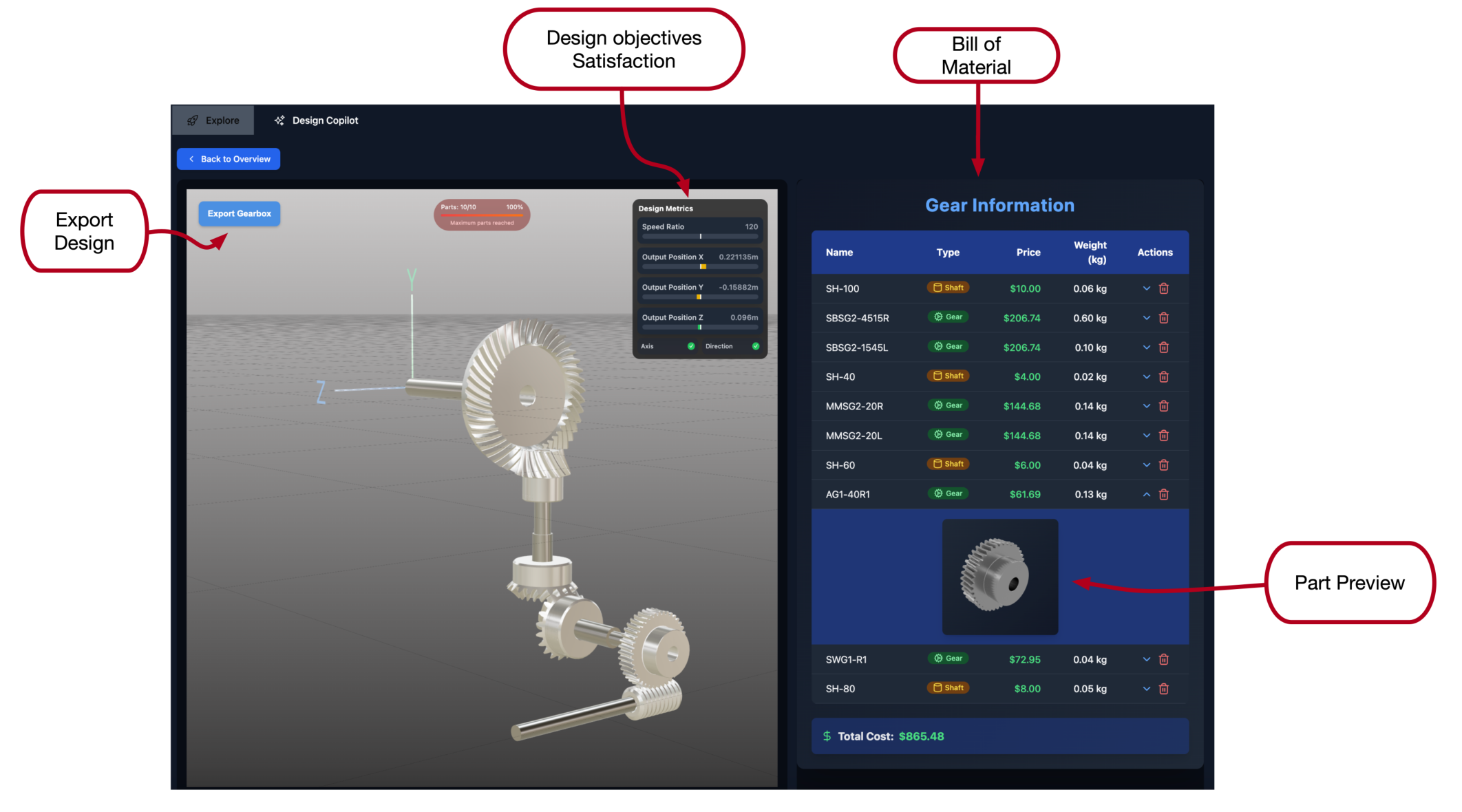
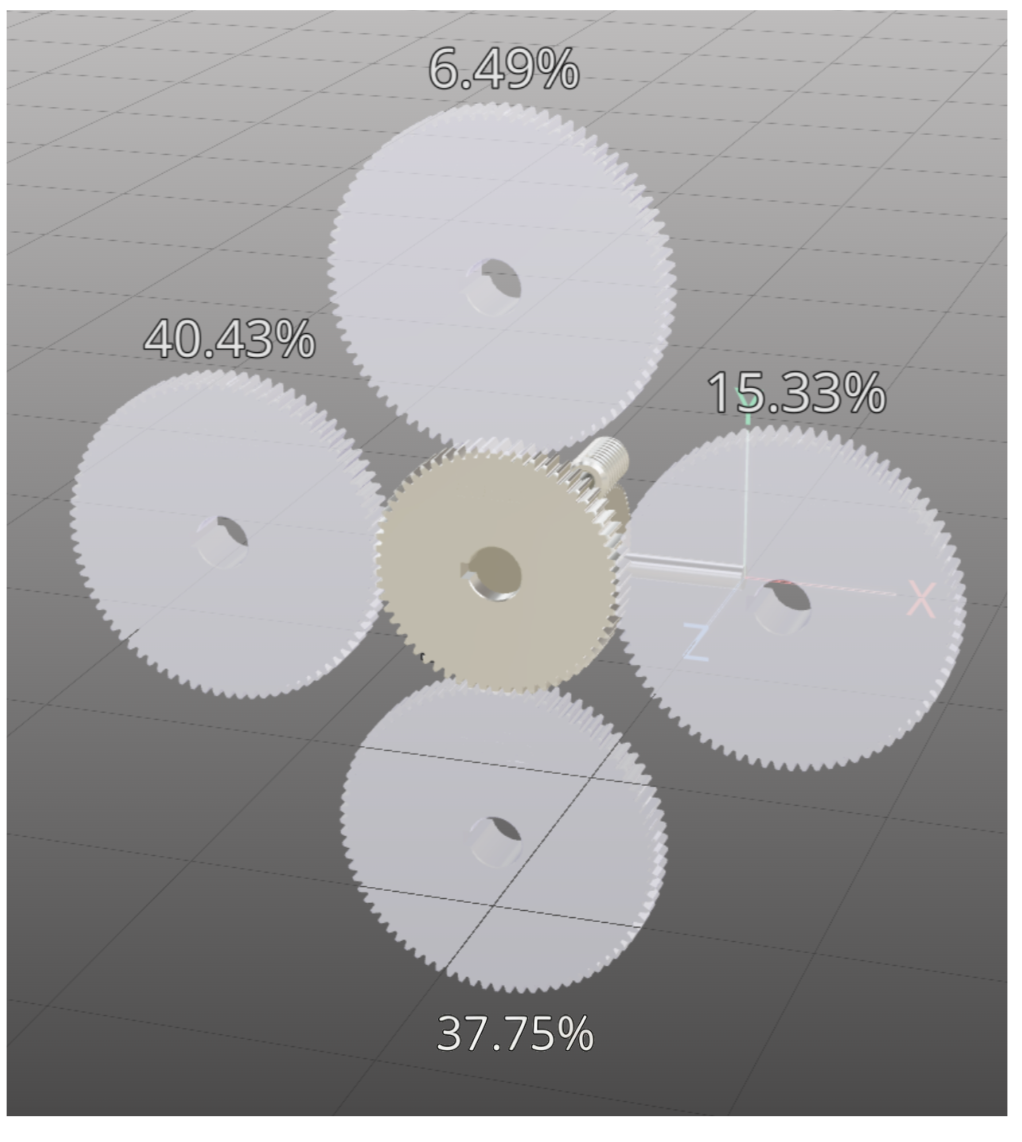
Generative artificial intelligence (AI), particularly transformer-based models, presents new opportunities for automating and augmenting engineering design workflows. However, effectively integrating these models into interactive tools requires careful interface design that leverages their unique capabilities. This paper introduces a transformer model tailored for gear train assembly design, paired with two novel interaction modes: Explore and Copilot. Explore Mode uses probabilistic sampling to generate and evaluate diverse design alternatives, while Copilot Mode utilizes autoregressive prediction to support iterative, context-aware refinement. These modes emphasize key transformer properties (sequence-based generation and probabilistic exploration) to facilitate intuitive and efficient human-AI collaboration. Through a case study, we demonstrate how well-designed interfaces can enhance engineers' ability to balance automation with domain expertise. A user study shows that Explore Mode supports rapid exploration and problem redefinition, while Copilot Mode provides greater control and fosters deeper engagement. Our results suggest that hybrid workflows combining both modes can effectively support complex, creative engineering design processes.
Figures

![Figure 11: For each respective mode, (a) average participant ratings [0-5] on their confidence in the designs generated and (b) number of participants who found a feasible solution that met all requirement metrics.](/publication/transformer-based-interfaces-for-mechanical-assembly-design-a/figure-11-cropped.png)
BibTeX
@misc{ataei2025transformerbasedinterfacesmechanicalassembly,
title={Transformer-Based Interfaces for Mechanical Assembly Design: A Gear Train Case Study},
author={Mohammadmehdi Ataei and Hyunmin Cheong and Jiwon Jun and Justin Matejka and Alexander Tessier and George Fitzmaurice},
year={2025},
eprint={2504.08633},
archivePrefix={arXiv},
primaryClass={cs.HC},
url={https://arxiv.org/abs/2504.08633},
}